ارزیابی قابلیت ردیابی نانوموتورها در حرکت هدفمند با استفاده از یادگیری ماشین
کد: G-1922
نویسندگان: Aziz Maleki *, Yeganeh Afroozmanesh ℗, Hamed Ghadimi, Maryam Garshasbi
زمان بندی: زمان بندی نشده!
برچسب: مطالعات پیش بالینی
دانلود: دانلود پوستر
خلاصه مقاله:
خلاصه مقاله
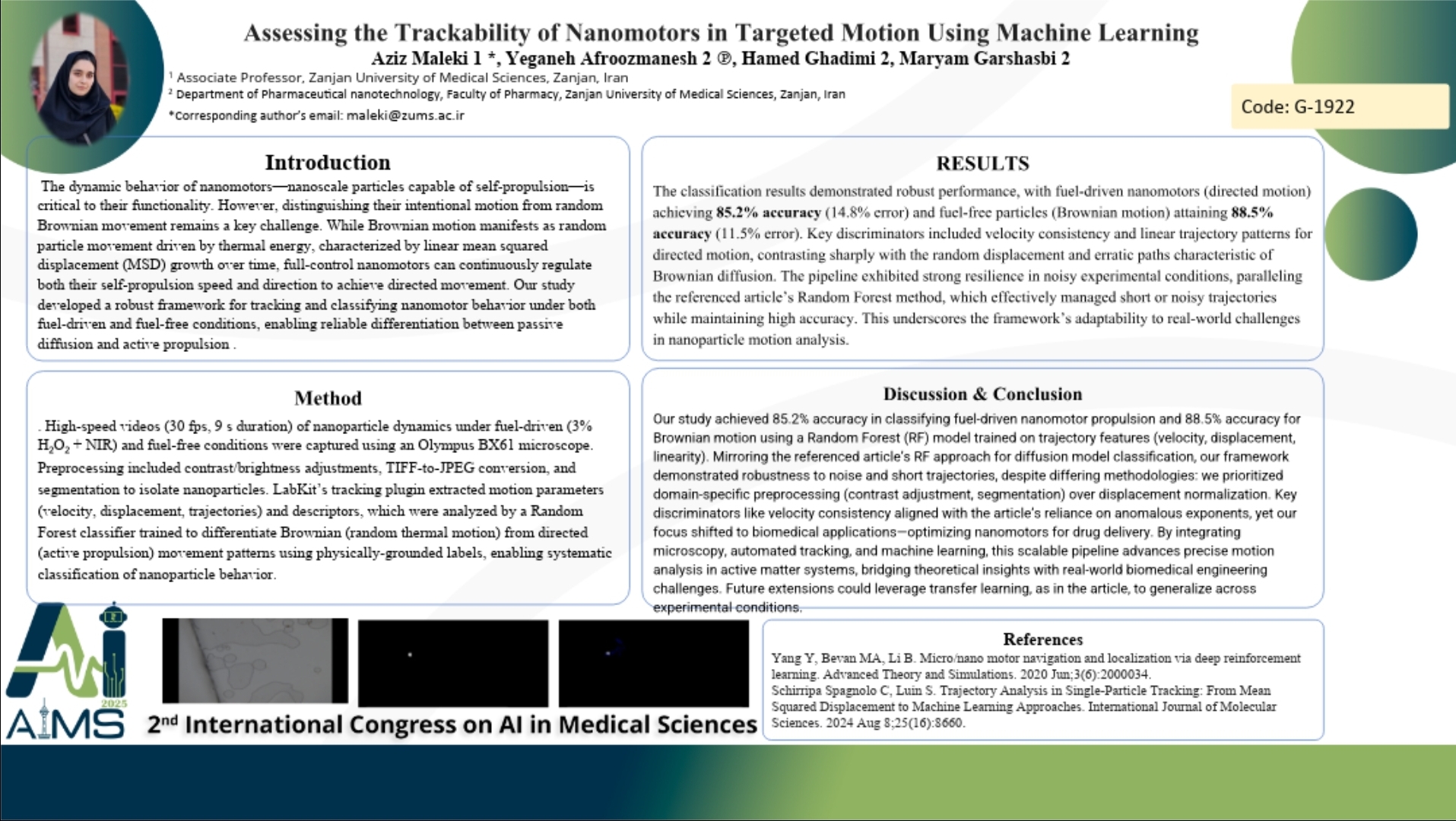
Background and Aims: The dynamic behavior of nanomotors—nanoscale particles capable of self-propulsion is critical to their functionality. However, distinguishing their intentional motion from random Brownian movement remains a key challenge. Our study aimed to develop a robust framework for tracking and classifying nanomotor behavior under fuel-driven and fuel-free conditions, enabling reliable differentiation between passive diffusion and active propulsion. Methods: Using an Olympus BX61 microscope, we captured high-speed videos (30 fps, 9 s average) of nanoparticles in fuel-driven (3% H₂O₂ + NIR) vs. fuel-free conditions to differentiate directed nanomotor motion from Brownian dynamics.. To enhance particle visibility, we adjusted video parameters (contrast, brightness, and shadows) and converted TIFF files to JPEG for compatibility. Next, we segmented the processed images to isolate individual nanoparticles from background noise. Using LabKit’s tracking plugin, we extracted quantitative properties such as velocity, displacement, and trajectory patterns. These features, combined with motion descriptors, were fed into a Random Forest algorithm. To train the model, we labeled trajectories as either Brownian (random) or directed (purposeful) motion, leveraging known physical principles of nanoparticle dynamics. Results: Due to dataset imbalance, we reported class-specific accuracy: our Random Forest model distinguished fuel-driven nanomotors (14.8% error, 85.2% accuracy) from fuel-free particles (11.5% error, 88.5% accuracy).Key discriminators included velocity consistency and trajectory linearity, with directed motion showing predictable displacement patterns versus Brownian movement’s randomness. Conclusion: By integrating image processing, automated tracking, and machine learning, we established a reproducible pipeline for analyzing nanomotor behavior. This approach not only addresses the challenges of nanoparticle tracking in noisy environments but also provides a scalable framework for future studies. Our work paves the way for optimizing nanomotor design for applications such as targeted drug delivery, where controlled motion is essential.
کلمات کلیدی
Nanomotors, Brownian motion, Machine Learning, Tracking