طراحی و ارزیابی یک سامانه سایبرنتیکی مبتنی بر هوش مصنوعی بهمنظور ایجاد ارتباط دوسویه میان مغز و پروتز رباتیک
کد: G-1860
نویسندگان: Mohammad Javad Akbari * ℗, Mehdi Zarrati
زمان بندی: زمان بندی نشده!
برچسب: پرینتر 3بعدی و اعضای مصنوعی
دانلود: دانلود پوستر
خلاصه مقاله:
خلاصه مقاله
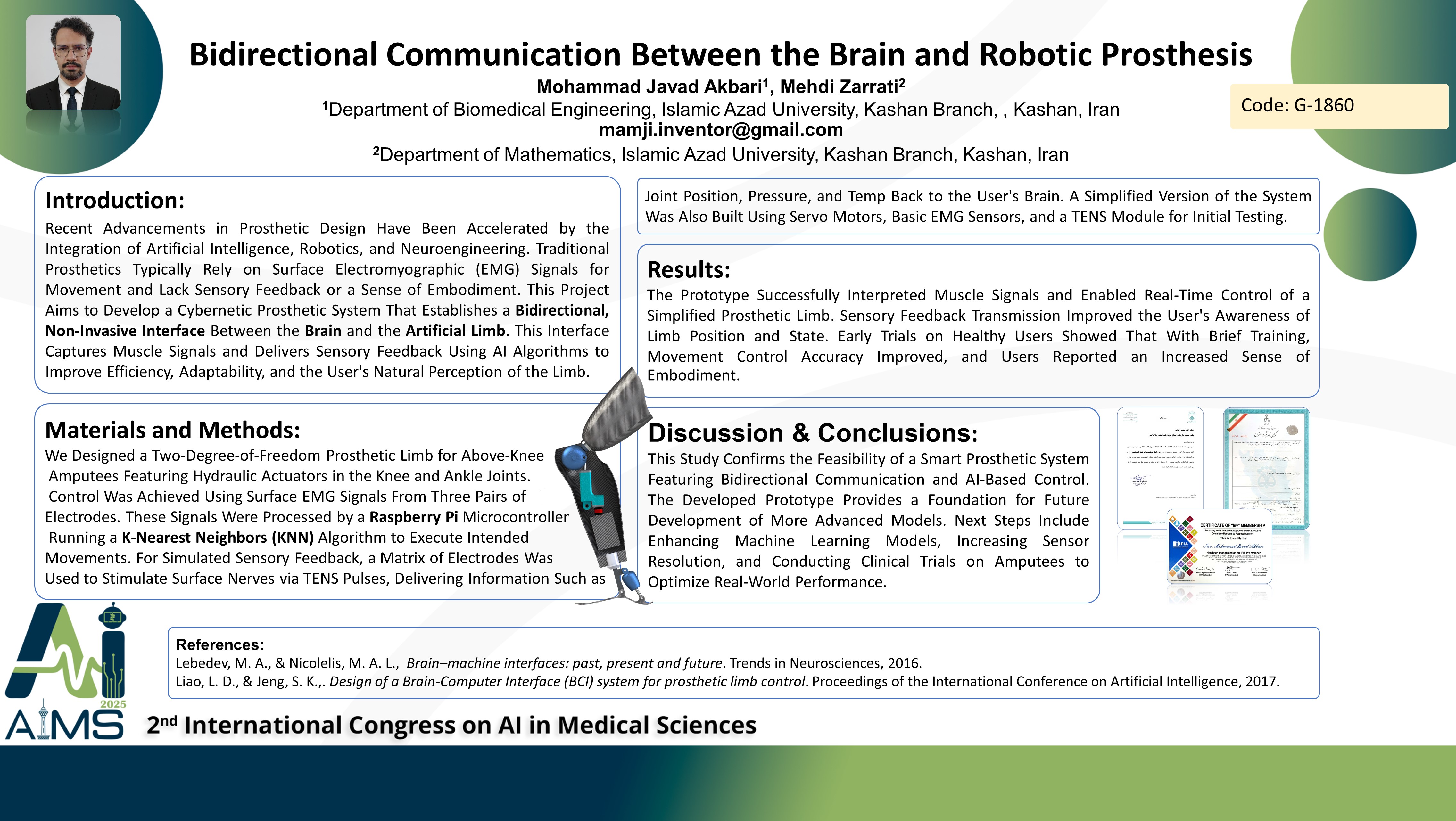
Background and Aims: Prosthetic Technologies Have Been Developed for Many Years to Overcome the Limitations of Amputees and Physically Disabled Individuals. However, the Lack of Intuitive and Bidirectional Communication Between the Human Nervous System and Robotic Prostheses Remains a Critical Challenge. This Study Aims to Design and Evaluate a Simplified Cybernetic System Capable of Establishing Non-Invasive, Two-Way Interaction Between the Brain and a Robotic Prosthesis Using Artificial Intelligence and Sensory Feedback Pulses. This Work Is Conducted as Part of Validating the Functionality of a Patented Invention (Patent No. 96795, Registered in Iran) Titled "Design and Development of an Intelligent Robotic Cybernetic Prosthesis Capable of Bidirectional Brain–Robot Communication via Artificial Intelligence and Artificial Sensory Stimuli." Method: Due to the Complexity, High Cost, and Potential Risks of Real-World Testing on Amputees, a Simplified Version of the Original System Was Constructed for Proof-of-Concept Experimentation. The System Employed an EMG Sensor to Acquire Muscle Signals and a TENS Module to Deliver Electrical Pulses to Sensory Nerves. Data Processing and Control Were Handled by Raspberry Pi and ESP32 Microcontrollers. Features Such as Mean Absolute Value, Signal Energy, Variance, and RMS Amplitude Were Extracted and Analyzed Using Lightweight AI Algorithms, Including K-Nearest Neighbors (KNN) and Simplified Decision Trees. A Servo Motor With Angular Feedback Was Used to Simulate Prosthetic Movement. Results: The Experiment Was Conducted in Two Stages: Training and Blind Validation. During Training, the User Gradually Achieved Better Control of the Servo Motor. In the Validation Stage, the Participant Attempted to Reach Angular Targets Without Visual Feedback. After a Few Sessions, the System Achieved an Average Accuracy of Approximately 70%, Demonstrating Its Capacity for Motion Recognition and Adaptive Sensory Feedback Using Simple Reinforcement Learning Techniques. Conclusion: The Findings Confirm the Feasibility of the Proposed System and Its Potential as a Foundational Platform for Advanced, Non-Invasive Brain–Prosthesis Interfaces. With Further Improvements in Hardware and the Integration of More Sophisticated Algorithms, the System Could Evolve Into a Practical Tool for Real-World Prosthetic Applications.
کلمات کلیدی
Prosthesis, Cybernetic, Artificial Intelligence, Feedback